Downloads#
3D models#
Simplified (lightweight) 3D *.STEP models of MABRobotics products can be found here.
CANdleSDK#
Please visit releases page for all of the CANdleSDK binary releases.
MAB Firmware#
Until the release of the new firmware files please use flashers listed below.
Legacy software#
Main stable releases:
| Date | CANdle lib | MDtool | pyCANdle | CANdle ROS | CANdle ROS2 | CANdle device | MD Firmware | Manual |
| earlier | 3.0 | 1.1.0 | 1.2.0 | 1.1.0 | 1.1.0 | 1.4 | 1.0 | 1.0 |
| 12.12.2022 | 3.1 | 1.2.1 | 1.3.1 | 1.2.0 | 1.2.0 | 2.0 | 2.0 | 1.1.0 |
| 05.04.2023 | 3.3.0 | 1.3.0 | 1.4.0 | 1.3.0 | 1.3.0 | 2.2.0 | 2.2.0 | 1.2.0 |
| 31.05.2024 | 3.4.0 | 1.4.1 | 1.5.1 | 1.3.2 | 1.3.2 | 2.2.1 | 2.3.1 | 1.2.1 |
| 22.08.2024 | 3.5.1 | 1.5.1 | 1.6.0 | 1.4.0 | 1.4.0 | 2.2.1 | 2.4.0 | 1.2.2 |
| 30.01.2025 | 3.5.3 | 1.5.3 | 1.6.0 | 1.4.0 | 1.4.0 | 2.2.1 | 2.4.1 | this document |
| 29.07.2025 | 3.5.4 | 1.5.4 | 1.6.0 | 1.4.0 | 1.4.0 | 2.2.1 | 2.5.0 | this document |
| 11.08.2025 (latest) | 3.5.4 | 1.5.4 | 1.6.0 | 1.4.0 | 1.4.0 | 2.2.1 | 2.5.1 | this document |
MD update tool - MAB CAN Flasher#
MAB_CAN_Flasher is a console application used to update the MD controller software using CANdle that can be downloaded at the top of this page. The MD firmware is contained in the MAB_CAN_Flasher application itself. To update the firmware connect the CANdle to the PC and the MD controller(s), and apply the power supply. You can make sure all the controllers are functional using MDtool and the mdtool ping all command before you proceed to update the controllers. After that, you are ready to run the update tool. We highly advise you to call ./MAB_CAN_Flasher --help command on the first use to get acquainted with the available options.
Note
Make sure the MAB_CAN_Flasher can be executed. If not use the sudo chmod +x ./MAB_CAN_Flasher command.
Example use cases#
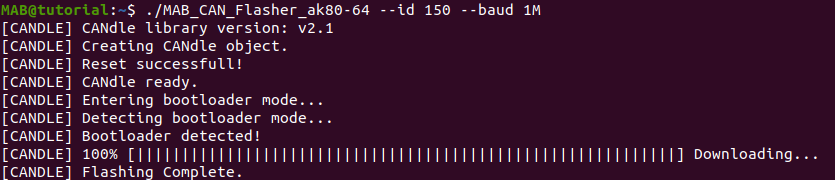
./MAB_CAN_Flasher --id 150 --baud 1M - update the MDxx controller with id equal to 150, which current CAN speed is 1M (the default CAN speed is 1M). Example output of this command for an ak80-64 motor:
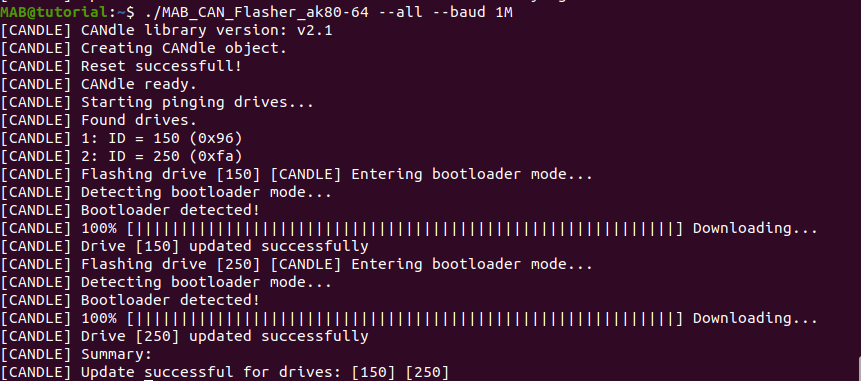
./MAB_CAN_Flasher --all --baud 1M - update all available MDxx controllers, whose current CAN speed is 1M (all controllers need to have the same speed). Example command output for two MD controllers:
Important
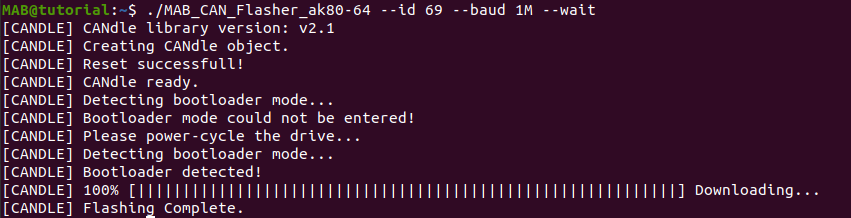
In case the update process is interrupted or the MD controller seems to be not functioning (fast periodical flashing of the LEDs), you can disconnect the power supply, call:
./MAB_CAN_Flasher --id 9 --baud 1M --wait
While the command is running connect the power supply. This command will wait for the bootloader response and try to recover the firmware. If the flashing does not occur in the first power cycle you can repeat it until the bootloader is detected. If using that procedure only one driver may be present on the can bus. An example output of the wait option for the ak80-64 motor is shown below:
CANdle update tool - MAB USB Flasher#
MAB_USB_Flasher is a console application used to update the CANdle software using USB bus. Currently, only updates over USB are supported (updates over SPI and UART are not supported). To update, first turn off all applications that may be using CANdle, and simply run ./MAB_USB_Flasher.
Note
Make sure the MAB_USB_Flasher can be executed. If not use the sudo chmod +x ./MAB_USB_Flasher command.

After a successful update, the CANdle device is ready.
CANopen Flashers#
Those flashers are intended to be used with CANopen controllers.
Important
Candle and CandleHAT devices do not support CANopen protocol.
Versions:
| Date | MD Firmware (CANopen) | EDS file for MD |
| 22.08.2024 | 2.4.0 | - |
| 30.01.2025 | 2.4.1 | MDv1.0.0.eds |
| 11.08.2025 (latest) | 2.5.1 | MDv1.0.0.eds |