MAB Ecosystem#
CANdle Ecosystem is a system of brushless actuator controllers (MD series motor controller) and translator devices (CANdle) used for interfacing with them. MD series controller actuators can be used in advanced robotic projects like quadrupedal robots, robotic manipulators, exoskeletons, gimbals, and many more.
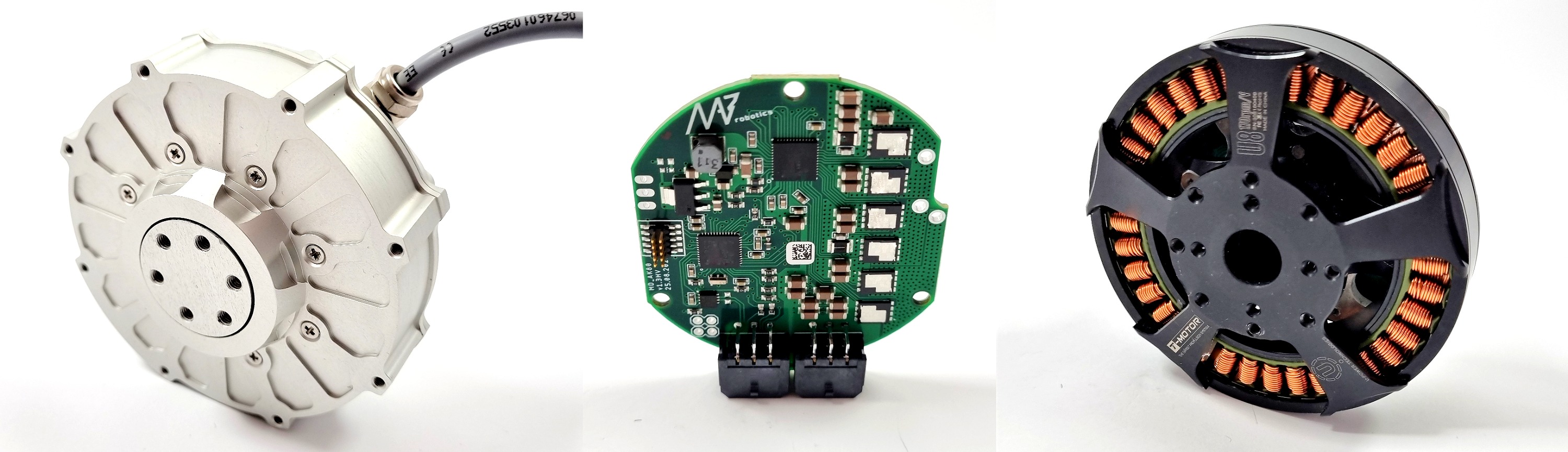
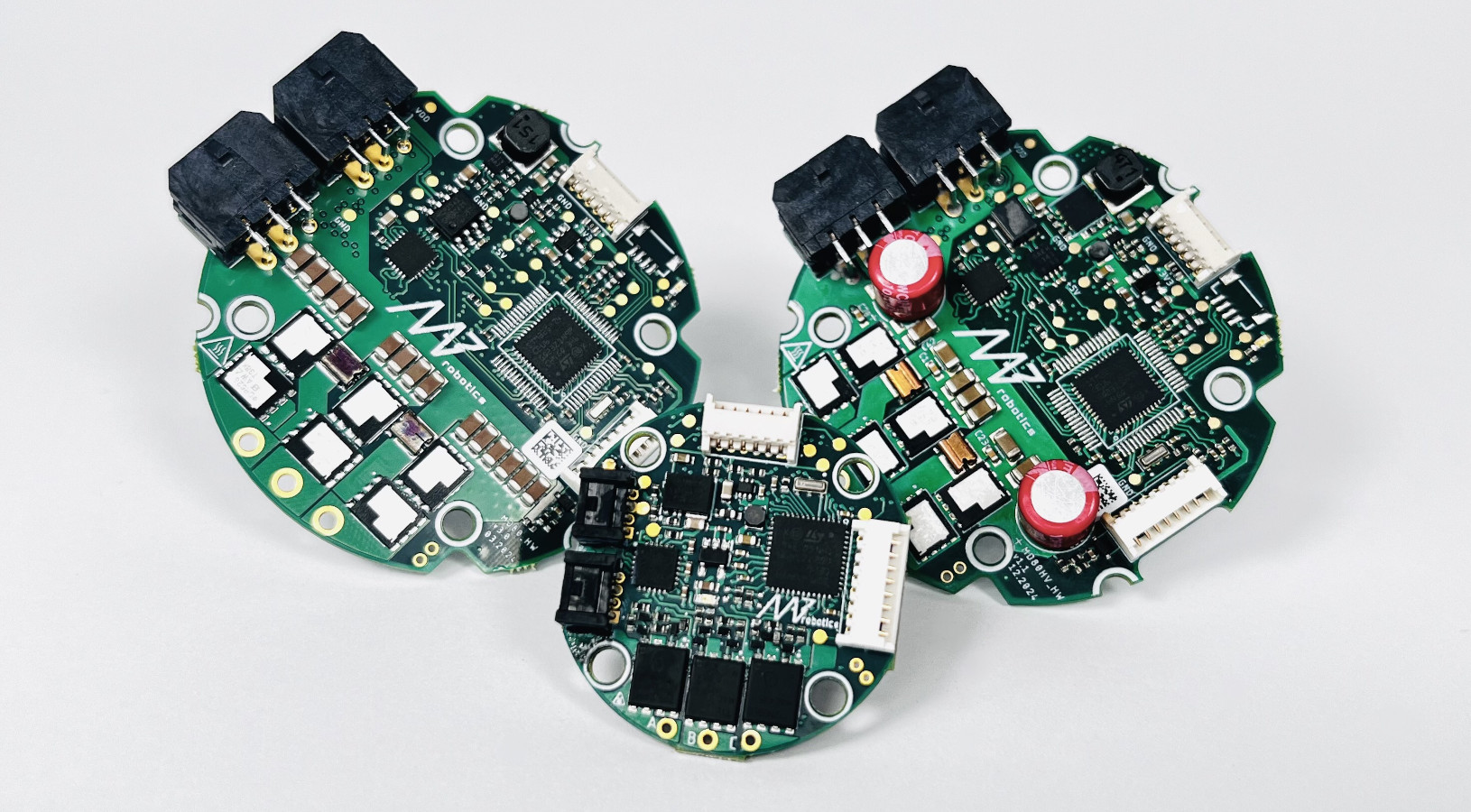
MD series motor controller#
MD series motor controller is a highly integrated brushless motor controller. It can be interfaced with a great variety of motors to turn them into advanced servo actuators. MD series motor controller can work with both direct drive (no gearbox) and geared motors. All MD series motor controllers, feature built-in absolute encoder, FOC based control algorithm and variety of motion control modes. MDs can also be equipped with additional encoders and brakes, for many application scenarios.
PDS - Power Distribution System#
PDS is a highly modular power management system, that aims to provide everything that a mobile robot needs. It allows for safe and reliable power distribution with diagnostics, and can be easily accessed via CANFD bus and CANdle.

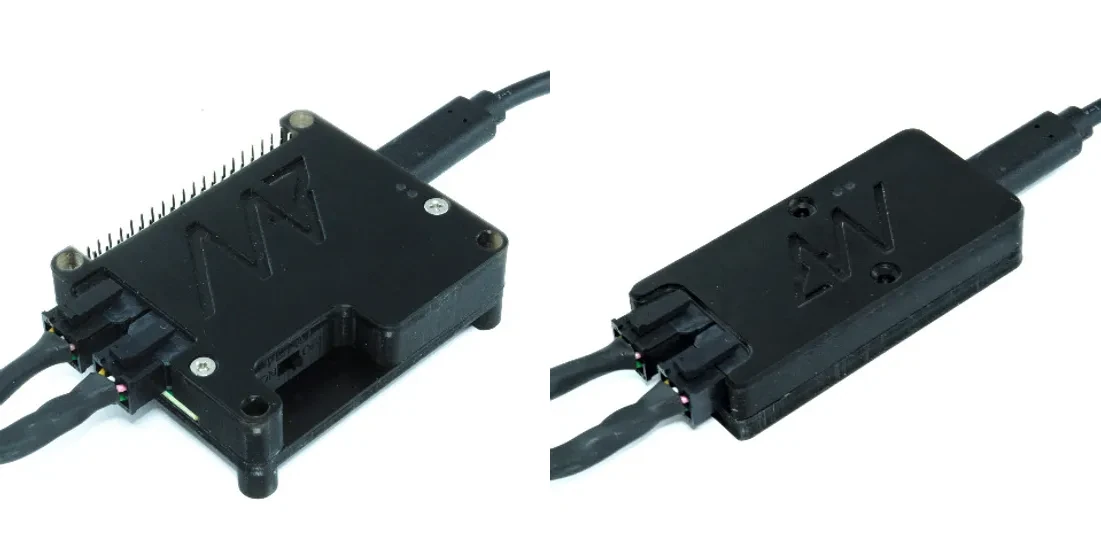
CANdle and CANdle HAT#
CANdle (CAN + dongle) is a translator device between the host controller (PC or SBC) and the MD series motor controller drivers. It is possible to interface CANdle with a regular PC over USB bus or CANdle HAT with SBCs (such as Raspberry PI) over USB, SPI or UART bus. The latest CANdle and CANdle HAT devices are fitted with a switch for enabling and disabling the built-in termination resistor. CANdle provides easy to use interface via C++, Python or ROS2 APIs, check CANdle-SDK for more info.
Note
We officially support Linux x86-64, Windows 11 and ARM64 architecture hosts via CANdleSDK.
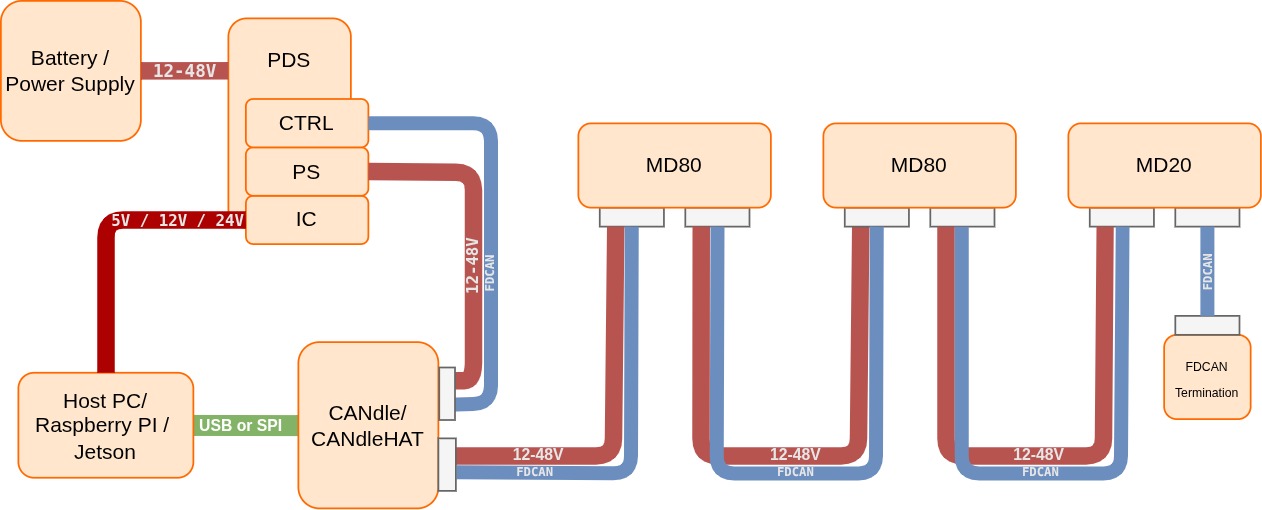
Hardware setup#
CAN bus topology is a single-line network structure. A typical hardware connection/wiring scheme for CANdle x MD ecosystem is presented in the picture below:
Hint
In case you’d like to read more about the recommended lengths of the bus segments we suggest the elektormotus guide.
The CAN bus termination is a single Molex connector with an embedded 120Ohm resistor. Termination should be always be attached to the first and last device in a string. CAN bus is very robust protocol, and can usually work on low speeds with just one terminator, however if you are experiencing any problems, we recommend you use a full terminator setup.
Hint
Both CANdle and CANdleHAT feature a termination circuit, that can be enabled with a switch.
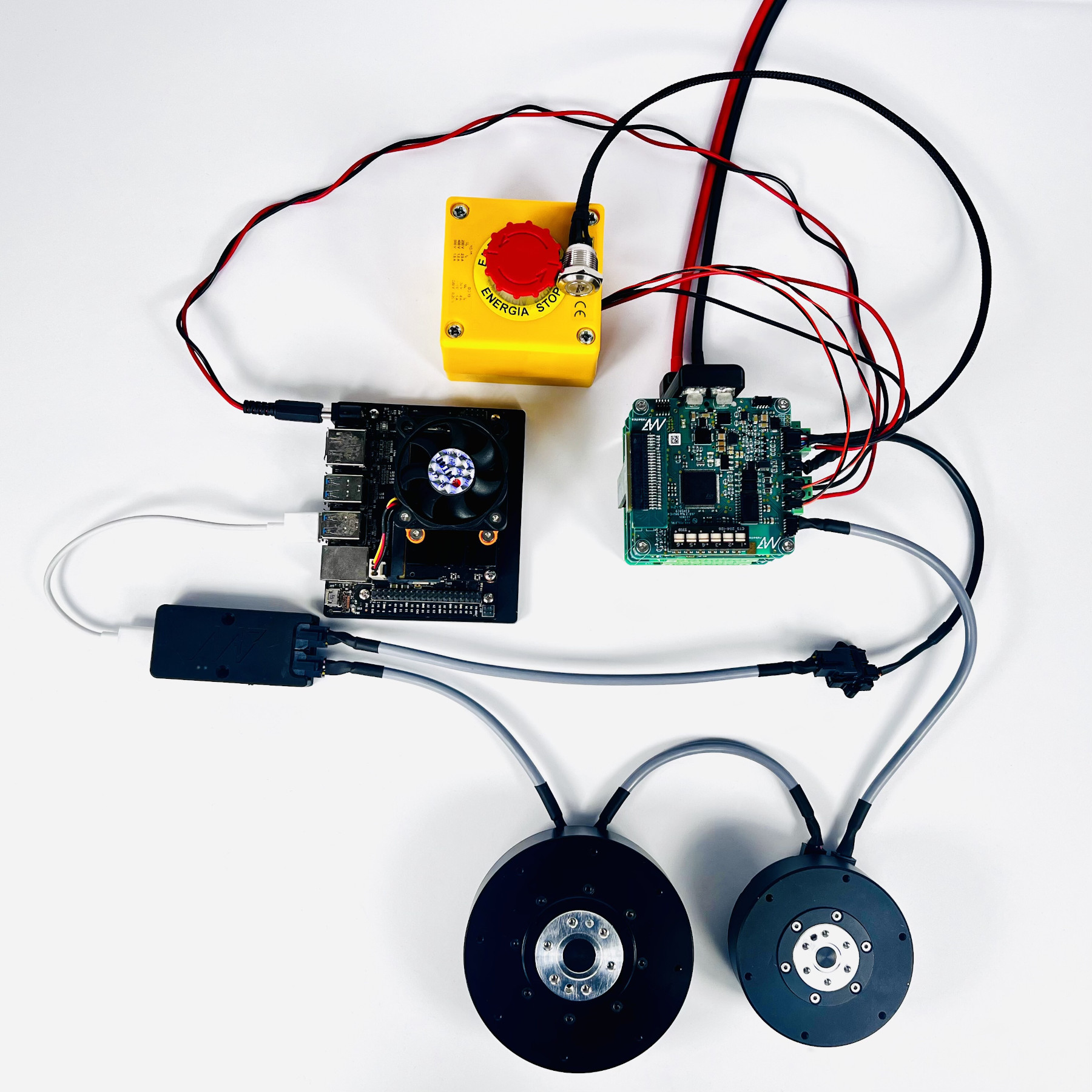
Here is an example setup of CANdle Ecosystem, with PDS, two MD based actuators, CANdle, and NVidia Jetson as host computer, all connected in a single communication string.
To learn more about MAB Ecosystem, check out one of the categories below: