Status
When an abnormal situation takes place the controller sets an error bit indicating a particular error or warning. The table below lists all available error and warning codes and their descriptions. The easiest way to check all statuses is to use mdtool. Another way could be to use the CANdle lib register access and read the statuses, or decode the general “Quick Status” using the CANdle lib getQuickStatus() function.
Errors and warnings can be cleared by register access, or using mdtool clear
Quick Status
Quick status provides a general info about errors in each category of statuses. No warnings are indicated here. Last bit indicatest whether the current target (position or velocity) has been reached.
Error bit
Error description
0
Main encoder error
1
Output encoder error
2
Calibration encoder error
3
MOSFET bridge error
4
Hardware errors
5
Communication errors
6
Motion errors
8-14
RESERVED
15
Target position (in Position PID / Profile position mode) or velocity ( in Velocity PID / Velocity profile mode) reached within position or velocity window
Main / Output Encoder Errors
Error name
Error bit
Error description
Action to clear it
ERROR_COMMUNICATION
0
MDxx could not communicate with the encoder
Check connections
ERROR_WRONG_DIRECTION
1
Indicates the calibrated output encoder direction is different from the main encoder direction
Recalibrate
ERROR_EMPTY_LUT
2
Indicates the encoder eccentricity table is empty
Recalibrate
ERROR_FAULTY_LUT
3
Indicates the encoder eccentricity table is faulty (contains too large corrections)
Check the setup and recalibrate
ERROR_CALIBRATION_FAILED
4
Calibration failed due to wrong motor <> encoder setup
Check setup, recalibrate in case of problems contact MABRobotics
ERROR_POSITION_INVALID
5
Position reading is invalid
Check endcoder physical setup, in case of problems contact MABRobotics
ERROR_INIT
6
Encoder initialization failed
Check endcoder setup and connection, in case of problems contact MABRobotics
WARNING_LOW_ACCURACY
30
Encoder position readout accuracy may be lower than specified
Check endcoder physical setup and reboot the MDxx
Calibration Errors
Error name
Error bit
Error description
Action to clear it
ERROR_OFFSET_CAL
0
Problem with the offset determination during calibration
Try recalibrating
ERROR_RESISTANCE_IDENT
1
Problem with resistance identification
Try recalibrating or running the `mdtool config bandwidth` command
ERROR_INDUCTANCE_IDENT
2
Problem with inductance identification
Try recalibrating or running the `mdtool config bandwidth` command
ERROR_POLE_PAIR_CAL
3
Problem with pole pair detection routine
Try recalibrating
ERROR_SETUP
4
Problem with motor config file download, or the setup parameters themselves
Check the config file again and try to upload one more time
Bridge errors
Error name
Error bit
Error description
Action to clear it
ERROR_BRIDGE_COM
0
Communication problem with the bridge
Contact MABRobotics
ERROR_BRIDGE_OC
1
The bridge detected overcurrent
Lower the current limit, clear the error or restart the drives
ERROR_BRIDGE_GENERAL_FAULT
2
Usually indicates a hardware issue
Contact MABRobotics
Hardware errors
Error name
Error bit
Error description
Action to clear it
ERROR_OVER_CURRENT
0
Overcurrent detected
Lower the current limit, clear the error or restart the drive
ERROR_OVER_VOLTAGE
1
Overvoltage detected
Lower the system voltage, avoid rapid braking in the system, use a modern PSU, or a LiPo battery
ERROR_UNDER_VOLTAGE
2
Undervoltage detected
Ensure your power supply has enough current capability for your system
ERROR_MOTOR_TEMP
3
Motor temperature exceeded the limit set in the config file
Wait for the motor to cool down
ERROR_MOSFET_TEMP
4
MDxx power side exceeded the limit of 100*C
wait for the MDxx to cool down
ERROR_ADC_CURRENT_OFFSETS
5
Error during adc current offsets calibration
Usually indicates a hardware error - contact MABRobotics
Comunication errors
Error name
Error bit
Error description
Action to clear it
WARNING_CAN_WD
30
Indicates the communication with the host was ended by the watchdog
make sure candle.end() is called in your script, clear using mdtool
Motion status
Error name
Error bit
Error description
Action to clear it
ERROR_POSITION_OUTSIDE_LIMITS
0
Current shaft position is outside the limits from the config file
Re-home the actuator, set a temporary zero to move it back into the limits, or increase the limit range, clear using mdtool
ERROR_VELOCITY_OUTSIDE_LIMITS
1
Velocity exceeded the max velocty param
Ensure the velocity limit is set to a proper value, clear using mdtool
WARNING_ACCELERATION_CLIPPED
24
Acceleration command was clipped to max acceleration at least once
Check acceleration limits, clear using mdtool
WARNING_TORQUE_CLIPPED
25
Torque command was clipped to max torque at least once
Check torque limits, clear using mdtool
WARNING_VELOCITY_CLIPPED
26
Velocity command was clipped to max velocity at least once
Check velocity limits, clear using mdtool
WARNING_POSITON_CLIPPED
27
Position command was clipped to either max or min position at least once
Check position limits, clear using mdtool
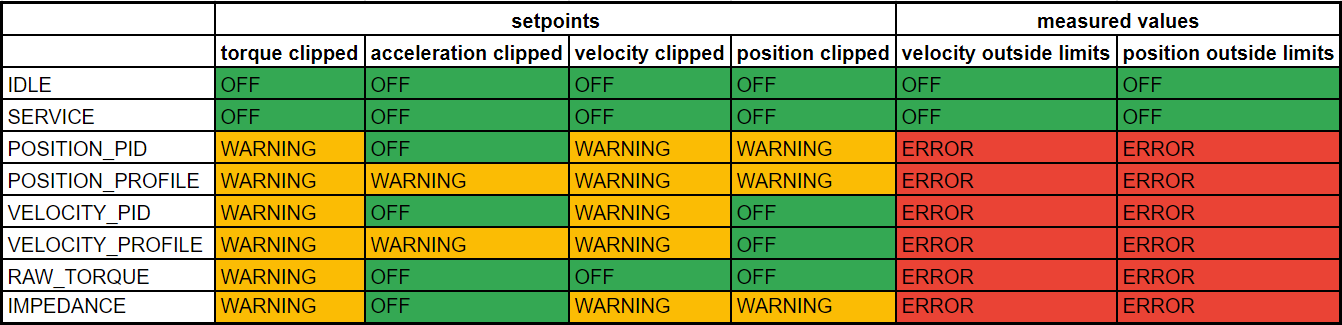
The following table shows when warnings and errors are issued based on the mode the controller is currently in: