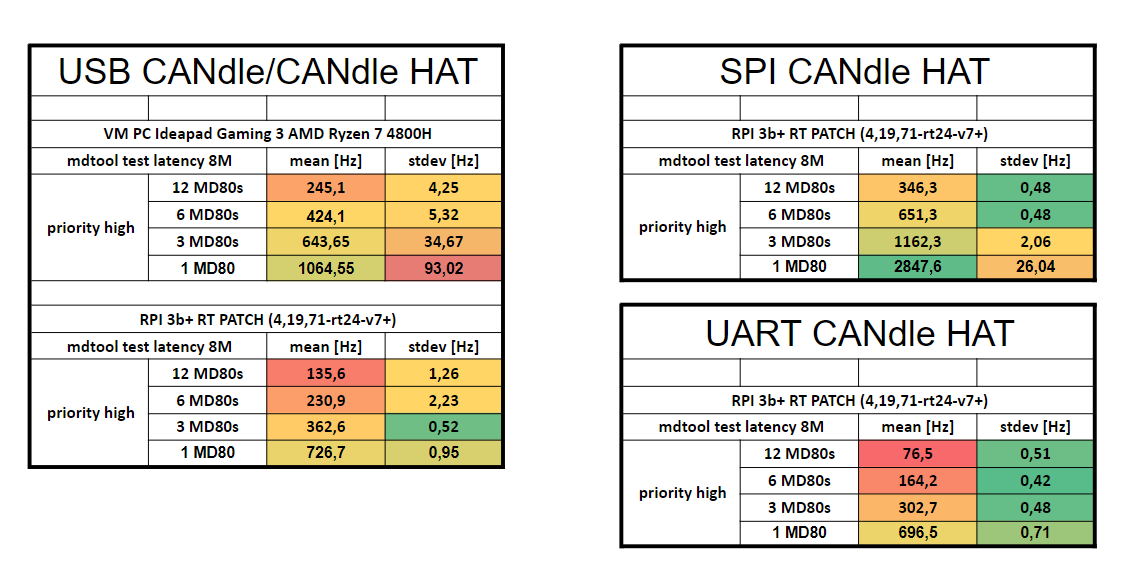
Latency#
The latency was measured using the mdtool test latency 8M command. Since the CAN frames are synchronized with master device frames the update rate of the master is the same as MD. The setup was tested on a PC using only USB bus (PC Ideapad Gaming 3 AMD Ryzen 7 4800H) and Raspberry PI 3b+ with RT PATCH (4.19.71-rt24-v7+) on USB, SPI, and UART bus.
High task priority was achieved using the following snippet in the mdtool test latency function:
struct sched_param sp;
memset(&sp, 0, sizeof(sp));
sp.sched_priority = 99;
sched_setscheduler(0, SCHED_FIFO, &sp);
To be able to change task priority be sure to call the test with sudo.
To change a running task priority use the snippet below. It can be useful when your program cannot be run directly with sudo - for example, when dealing with ROS nodes.
CONTROL_PID=$(sudo pidof -s <NAME_OF_YOUR_EXECUTABLE>)
CONTROL_PRIORITY=99
sudo chrt -f -p ${CONTROL_PRIORITY} ${CONTROL_PID}
During testing on Raspberry PI SBCs we have found out that isolating a CPU core (isolcpus) specifically for the CANdle process did not result in a performance increase - rather made it less performant.
Note
When dealing with the MD x CANdle ecosystem for the first time we advise using the USB bus that is available on both CANdle and CANdle HAT devices.