CANdle and CANdle HAT#
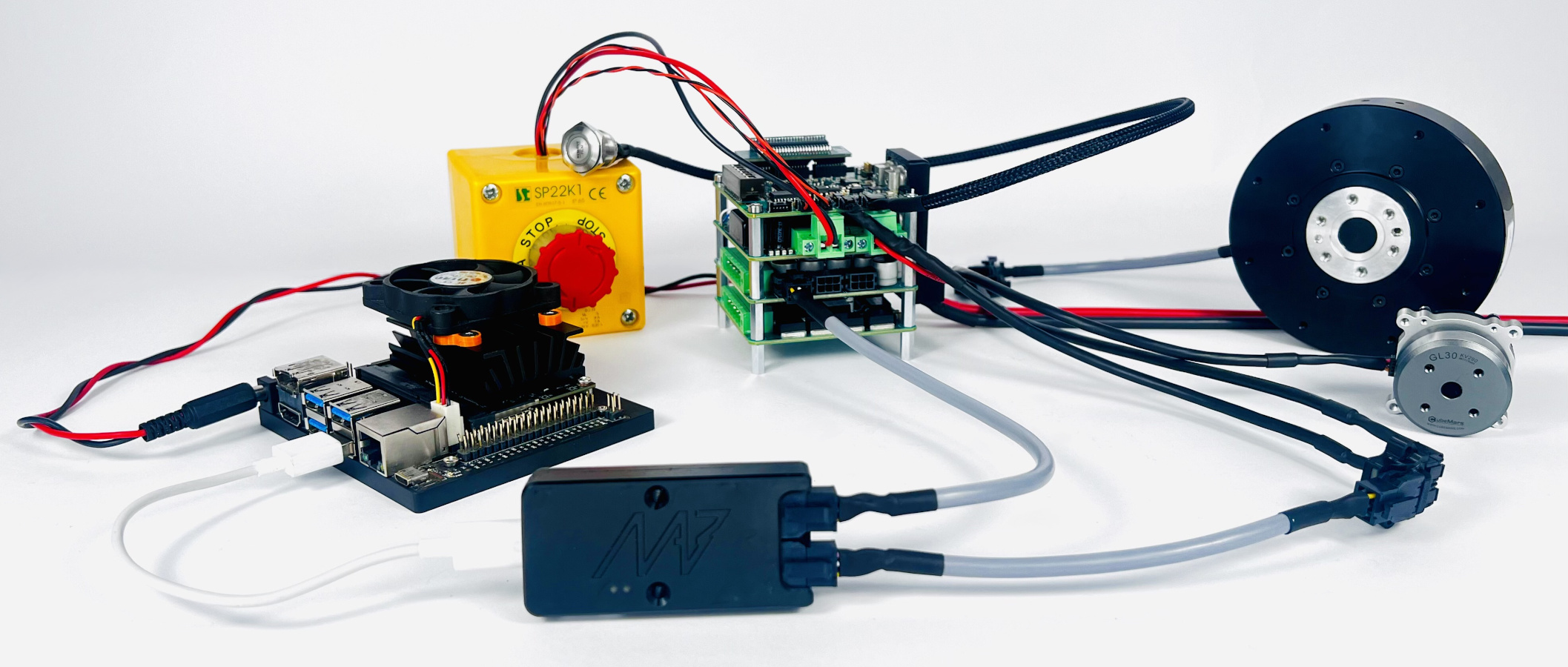
CANdle is a converter used to communicate between MD controllers, PDS and the host device. Currently, there are two CANdle versions - CANdle and CANdle HAT.
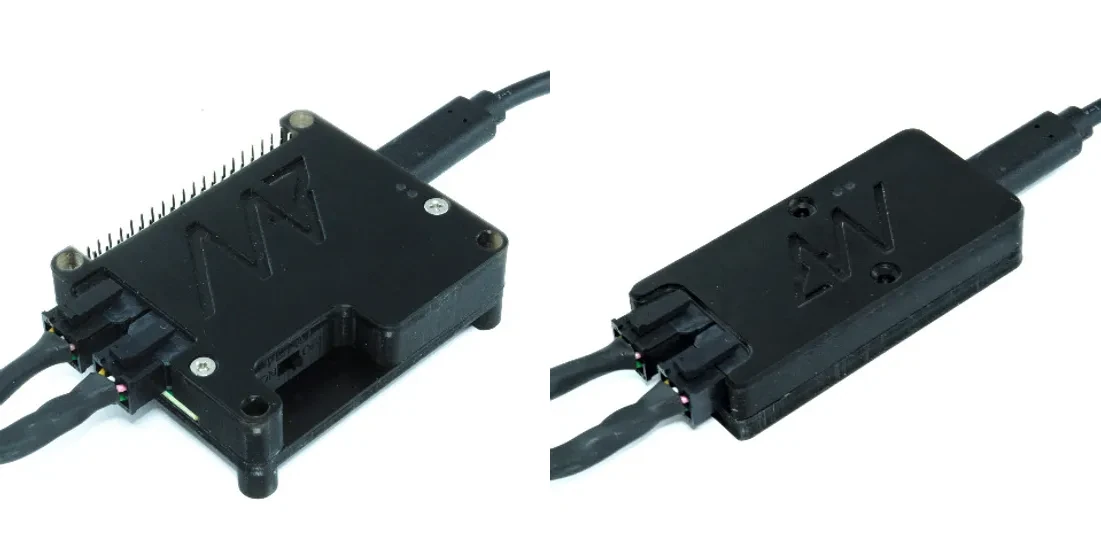
The first one is a simple version that uses USB bus to communicate with the host, whereas the latter can communicate using USB or SPI and is easy to integrate with SBCs such as Raspberry PI. The communication with MDs and PDS is performed using CAN bus, using either MABs proprietary protocol, or CANOpen (only MD).

CANdle can be accessed via CANdle-SDK, which is comperhensive set of tools, that can be used to develop applications with MAB products.
Purpose & Limitations#
While CANdle and CANdleHAT are very capable devices, their main purpose is to allow the users to quickly get onboard with MD and PDS family of produces. While developing CANdle and CANdle-SDK, we aim for flexibility, ease-of-use and reliability over performance. The main purpose of CANdle and HAT, is to be a great starting point in product development process, but not necessarily a final motion-control solution.
This means that it is usually not possible to fully unravel the potential of some of our products, when accessing them exclusively through CANdle. We are constantly working on improving the performance of the Ecosystem, but due to many factors that are out of our control (operating system latency, user space limitations, kernel behaviour, unknown host hardware etc.), CANdle may not be sufficiently fast for some applications. In this case, MAB team will be happy to assist you with engineering advise or prepare a custom high-speed communication solution.
Where CANdle will work great as is:
AGVs,
ROVs,
drones,
simple robotic arms and cobots,
testing benches and setups,
MVP of mechatronics products,
Where CANdle will likely be too slow:
high DoF humanoid robots,
agile, dynamic quadrupedal robots,
high-freq control loops (500Hz+).